



L’intervento
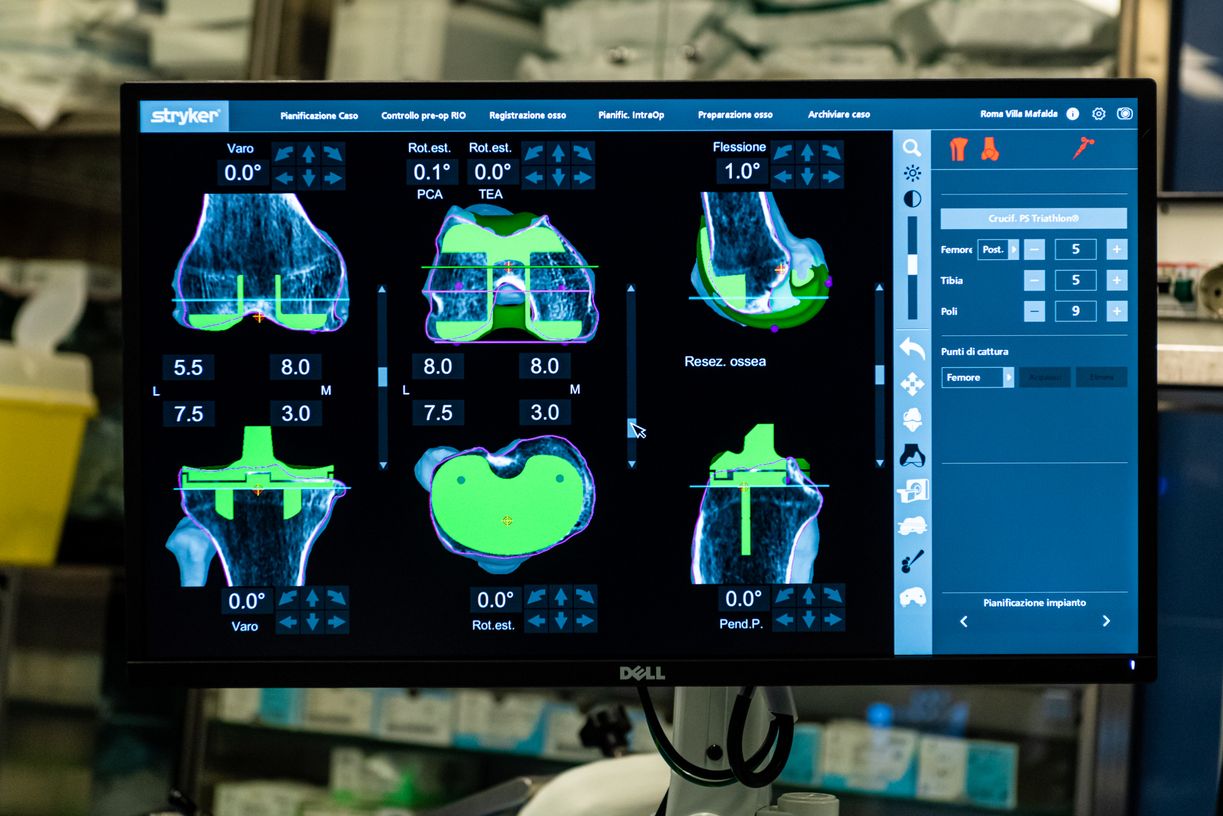
La tecnica robotica dell’artroprotesi di ginocchio consiste nell’applicazione di una protesi (totale o parziale) con l’ausilio della tecnologia Mako. Questa, si avvale di un sistema computerizzato che elabora un modello 3D del ginocchio da operare sulla base delle immagini TC 3D acquisite prima dell’intervento.

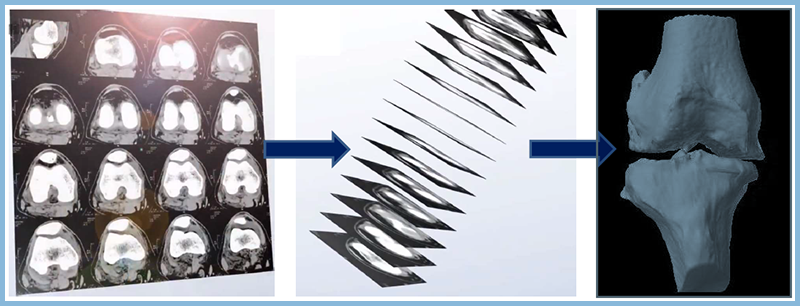
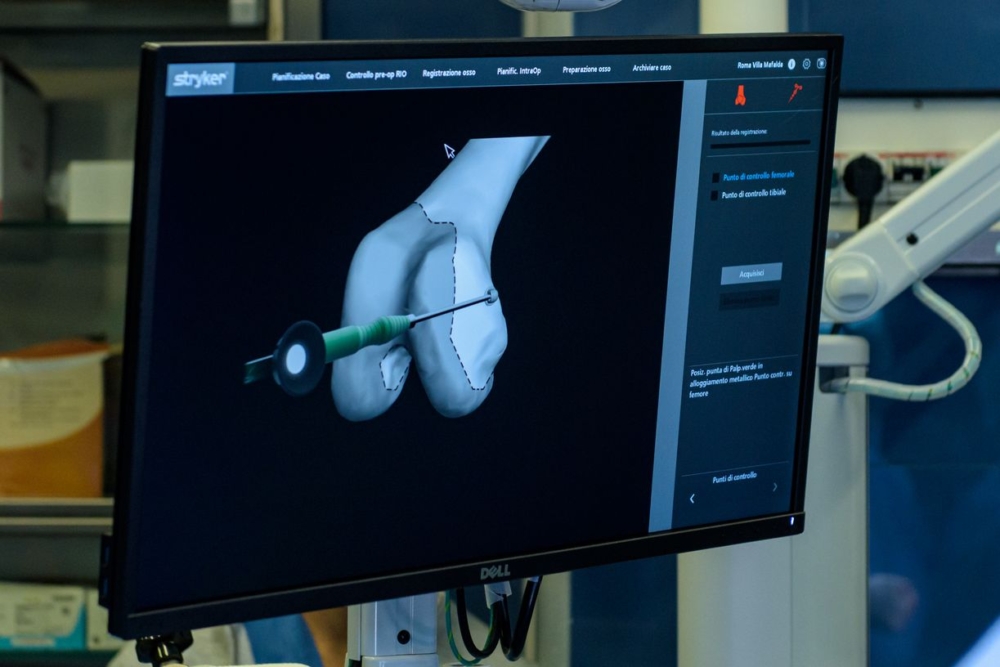
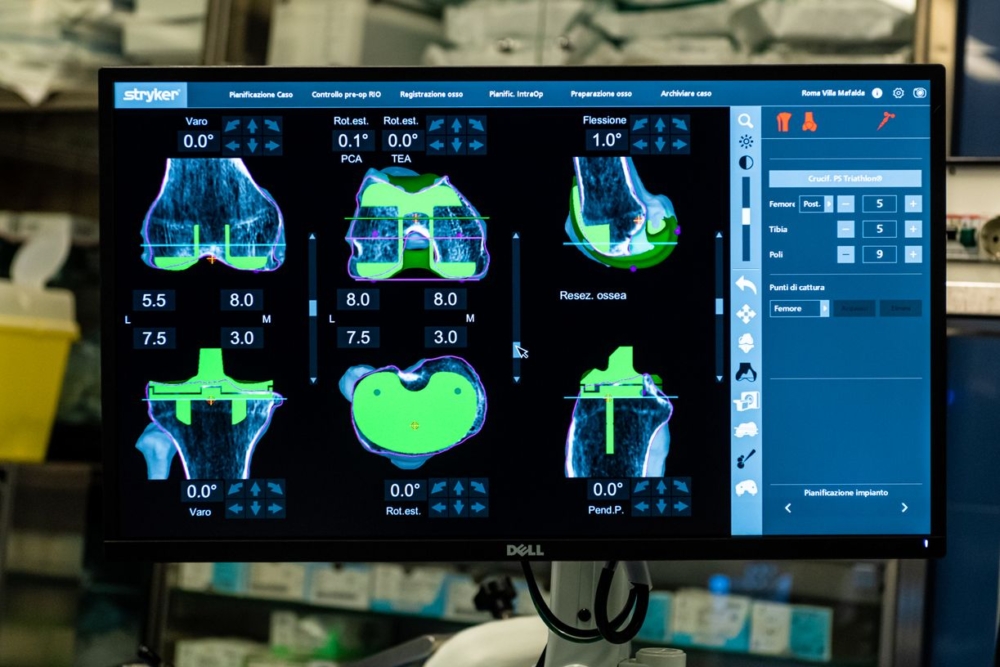
Viene così creato un modello virtuale del ginocchio a tre dimensioni che, insieme alle informazioni trasmesse dai sensori posizionati sull’articolazione durante l’intervento, serve per elaborare le istruzioni chirurgiche corrette utili a posizionare la protesi nella giusta sede e bilanciarla in modo perfetto.
Successivamente, grazie al braccio robotico, il chirurgo potrà creare, con precisione massima, l’alloggiamento osseo in cui andrà posizionata la protesi.
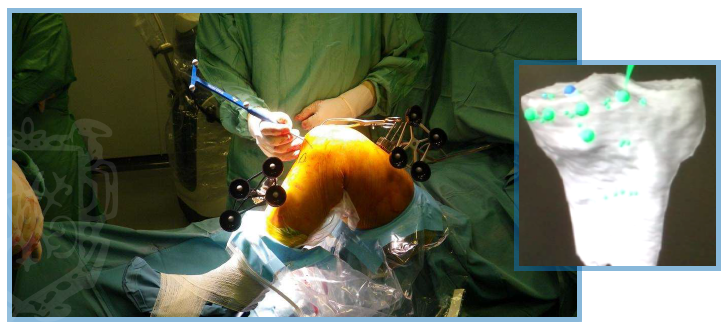

L’intervento viene eseguito attraverso un’incisione di 4-5 cm nel caso di protesi parziali e di 10-12 cm nel caso di protesi totali. La mini-invasività della tecnica consente anche di mantenere costante la circolazione durante l’intervento, con grande beneficio nel post operatorio (riduzione del dolore di compressione da laccio pneumo-ischemico).

Grazie alla grande precisione del sistema, l‘impianto di una protesi totale di ginocchio può così essere limitato solo ai casi di usura articolare generalizzata (circa il 50% dei casi). Nei casi in cui una volta veniva sconsigliata, ad esempio nell’insufficienza del legamento crociato anteriore, ora può essere applicata una protesi monocompartimentale che presenta diversi vantaggi per il paziente.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}